I don’t see anybody selling an angle-of-attack sensor for FPV RC aircraft, so I’m making my own.
Here’s the first (quite crude) prototype:
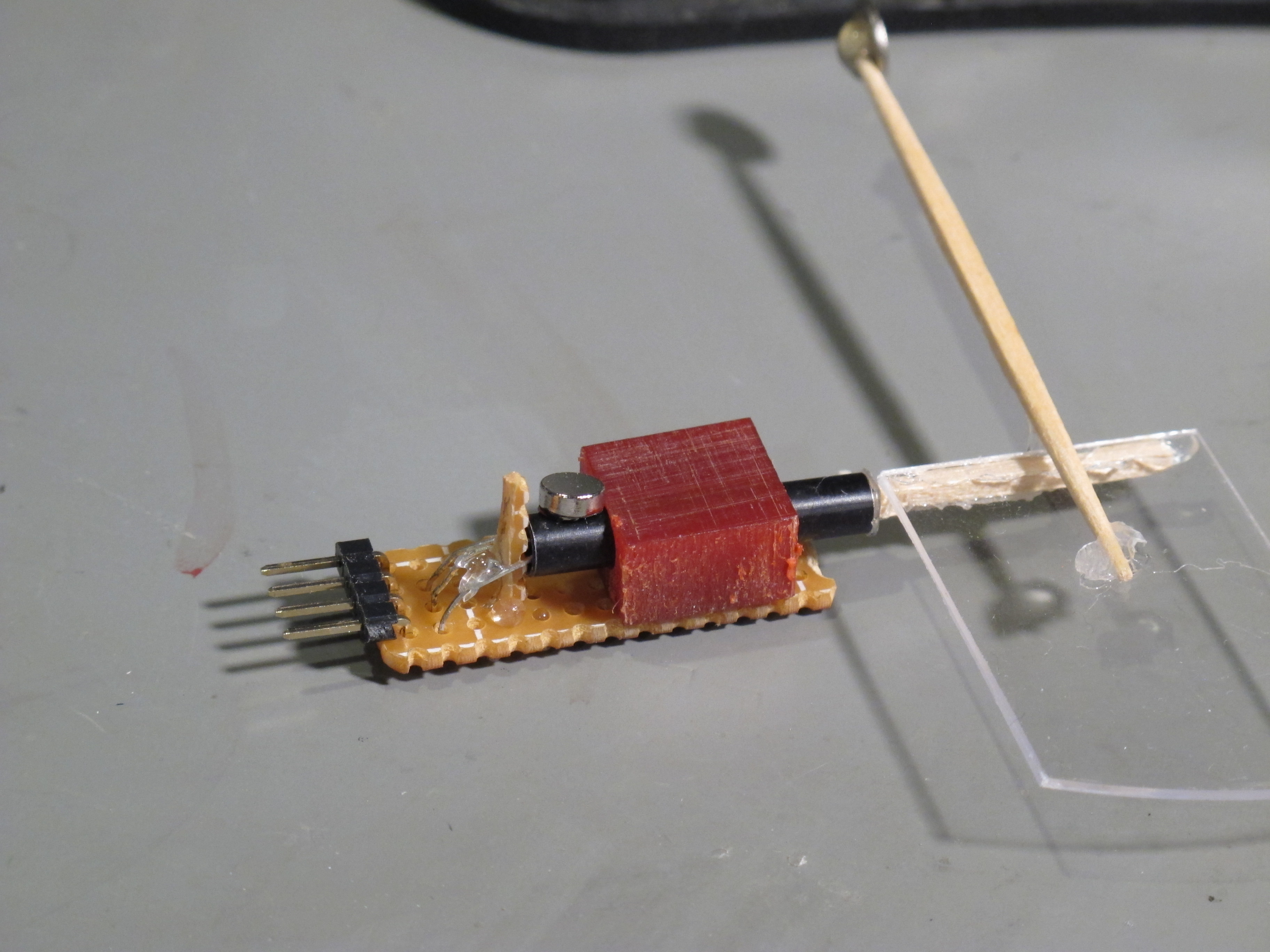
It’s nothing more than a hall effect sensor inside a hollow tube (the black plastic spacer) with a magnet glued onto it. It’s held by the red plastic block with a hole drilled thru it.
The other end of the tube has a crude weathervane attached (the counterweight needs more work).
It seems to work reasonably well:
I’d feed the output into an ADC on a PIC.
The whole thing is too loosey-goosey for flight – this was just a prototype to see if the idea works.
Now I’m trying to figure out how to make a flightworthy version. Maybe this would be a good first 3D printer project?