This is post #5 in a series covering the hardware and software design for my work-in-progress GPS-guided rocket recovery project. The main index to the series of posts is here, and an introduction to the project (a PowerPoint presentation) is here.
In this post I’ll cover stateMachine.c, which implements the finite state machine (FSM) that handles most of the functional logic of the system.
STATE MACHINE
When implementing a state machine, I don’t feel an obligation to observe the constraints of a formal FSM of the kind taught in schools, where all functionality happens in state transitions.
Instead, I treat each state as a system mode. There are state entry actions and state exit actions, but while in each state the system also has a distinct behavior. While I could draw a state diagram, I’ve never bothered – the system is simple enough that it’s unnecessary, and the diagram wouldn’t capture much of the important behavior of the system.
The state machine is run one step by a call to StateMachine() from main(), which happens once each time through the main loop.
Each of the six states, IDLE, ARMED, TIMEDLAUNCH, FLIGHT, FULL, and TEST, (all defined in stateMachine.h) has an associated “state function” that implements the system behavior for that state. Each state also has an associated entry function, which can be called by state functions to cause the system to transition to a new state.
The state functions take and return no parameters and have the same names as the state symbols, but in lowercase:
- void idle(void);
- void armed(void);
- void timedlaunch(void);
- void flight(void);
- void full(void);
- void test(void);
The entry functions also take and return no parameters and are named based on the state they enter:
- void enterIDLE(void);
- void enterARMED(void);
- etc.
The current state and sub-state are stored in global variables State and Substate.
STATE TRANSITIONS
When conditions warrant, a state function will cause a transition to a different state by calling the appropriate entry function, which will change the global variables State and Substate to reflect the new state, as well as performing any entry actions needed to configure the system for the new state.
A flag, stateTransitionInProgress, is reset to FALSE on entry into StateMachine(). Each entry function starts by verifying that this flag is FALSE, and if so, setting it TRUE. If the flag is not FALSE on entry, this indicates that the FSM has already transitioned to a new state, and therefore the call to the entry routine is invalid. In that case, the entry routine is aborted and the state remains unchanged.

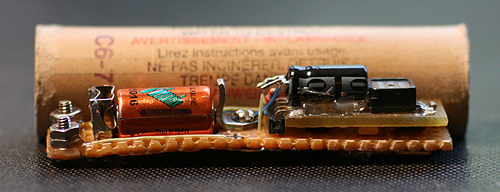
Wiring to camera shutter button
This eliminates the possibility of a subtle bug which could occur if, once a state function calls an entry function (to transition to a new state), later logic in the same state function tries to put the system into a different new Read the rest of this entry »
















{kind=link}
{kind=link}